
kuka系统变量,编程与维护的关键
时间:2024-11-24 来源:网络 人气:
KUKA机器人系统变量详解:编程与维护的关键
在工业自动化领域,KUKA机器人以其卓越的性能和可靠性著称。系统变量在KUKA机器人编程与维护中扮演着至关重要的角色。本文将详细介绍KUKA机器人系统变量的概念、分类、应用以及注意事项,帮助读者更好地理解和运用这些变量。
一、系统变量的概念
系统变量是KUKA机器人编程中用于存储和传递数据的变量。它们可以是数值、字符串或布尔值等类型,用于控制机器人的运动、逻辑判断以及与其他系统组件的交互。
二、系统变量的分类
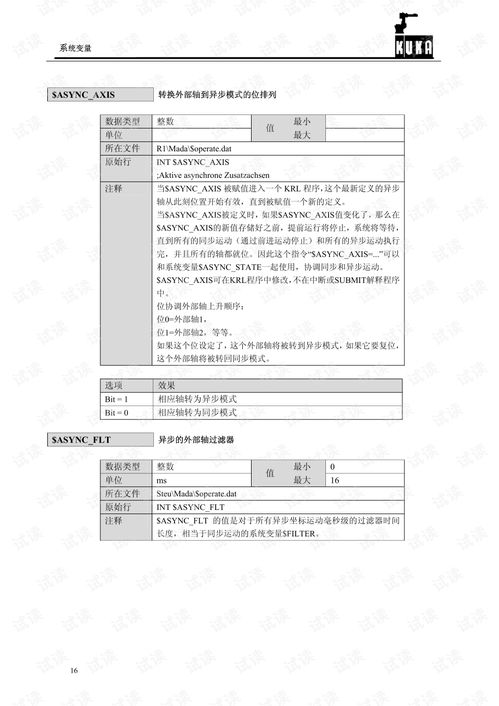
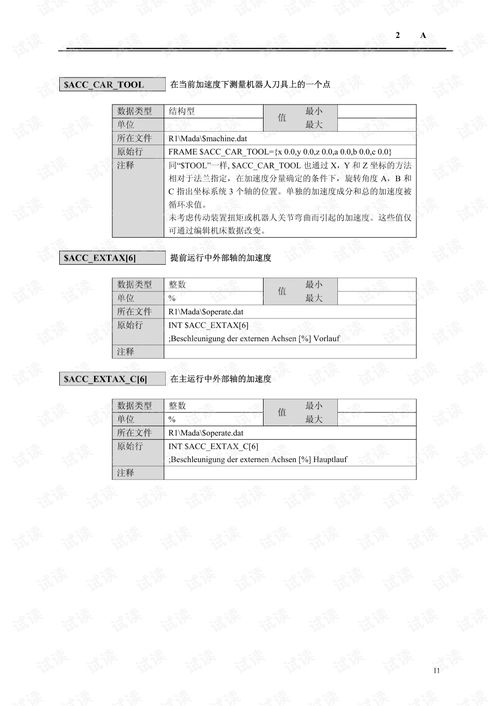
1. 位置变量:用于存储机器人的当前位置信息,如坐标、姿态等。
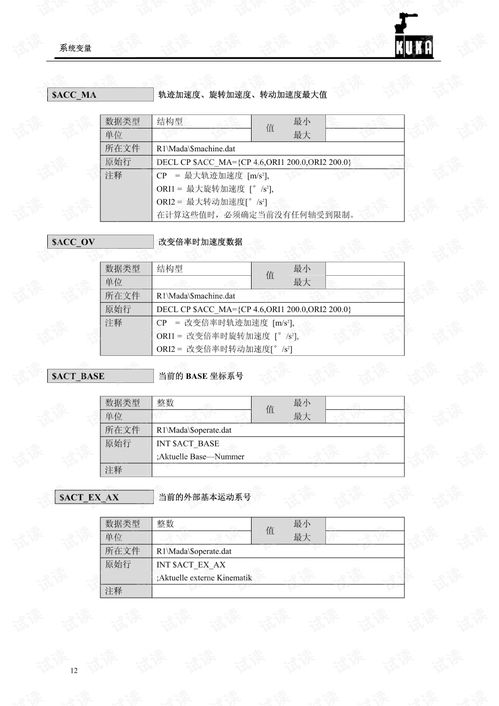
2. 速度变量:用于设置机器人的运动速度,包括线性速度和旋转速度。
3. 时间变量:用于控制机器人动作的持续时间,如延时、循环等。
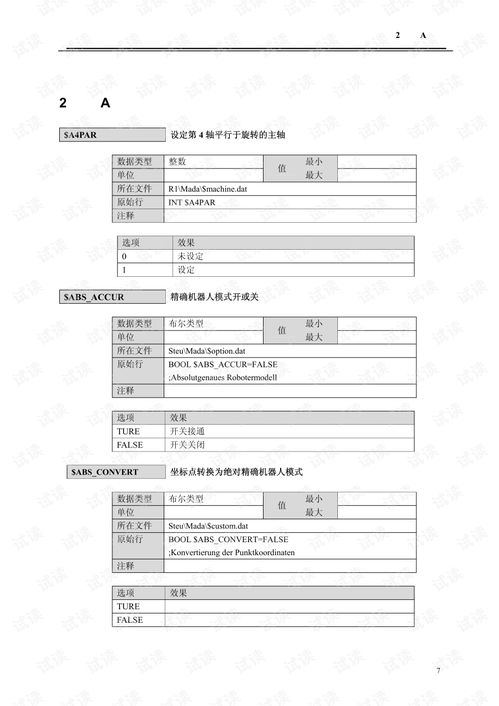
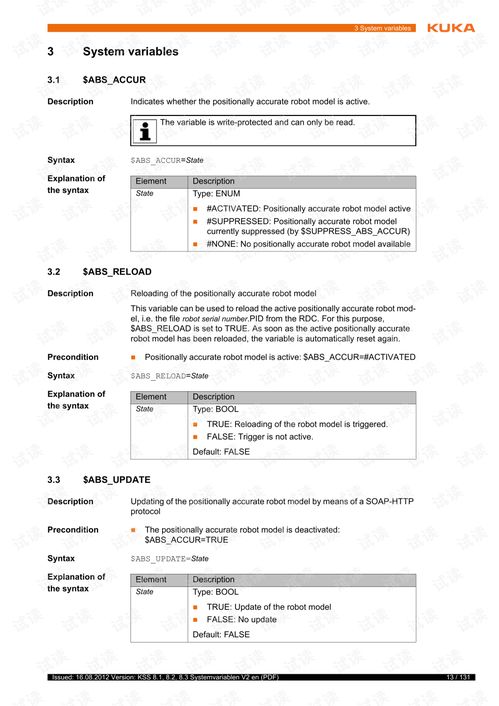
4. 逻辑变量:用于表示机器人的状态,如启动、停止、错误等。
5. 输入/输出变量:用于与外部设备进行数据交换,如传感器、执行器等。
三、系统变量的应用
1. 位置变量:在路径规划中,通过设置位置变量,可以精确控制机器人到达指定位置。
2. 速度变量:在运动控制中,通过调整速度变量,可以实现平滑、高效的机器人运动。
3. 时间变量:在循环控制中,通过设置时间变量,可以控制机器人动作的执行时间。
4. 逻辑变量:在程序逻辑中,通过判断逻辑变量的值,可以实现条件分支、错误处理等功能。
5. 输入/输出变量:在与其他设备交互时,通过读取输入变量或写入输出变量,可以实现数据交换和协同工作。
四、系统变量的注意事项
1. 变量命名规范:遵循KUKA机器人编程规范,使用有意义的变量名,便于理解和维护。
2. 变量类型选择:根据实际需求选择合适的变量类型,避免数据类型错误。
3. 变量初始化:在程序开始前,对系统变量进行初始化,确保程序稳定运行。
4. 变量作用域:合理设置变量作用域,避免变量冲突和误用。
5. 变量修改:在修改系统变量时,注意对程序进行测试,确保修改后的程序仍能正常工作。
系统变量是KUKA机器人编程与维护的核心,掌握系统变量的概念、分类、应用和注意事项,对于提高编程效率和系统稳定性具有重要意义。本文对KUKA机器人系统变量进行了详细解析,希望对读者有所帮助。
相关推荐


教程资讯
教程资讯排行









